先週、私は最後のNSRPコンピュータ支援ロボット溶接(CAR-W)デモンストレーションのためにロックポートルイジアナに旅行しました。 このデモンストレーションでは、ShipConstructor 3D 製品モデル内の溶接情報を活用して、ガントリーに取り付けられた 9 軸ロボット アームを最小限のユーザー操作で駆動する方法を示しました。 すべての溶接路と属性情報はShipConstructor海洋情報モデルから生成され、ウルフロボティクスCAR-Wソフトウェアに渡されたので、ロボットの プログラミングは全く必要とされなかった 。 これは、溶接計画経路マジックが起こるだけでなく、ロボットの 衝突自由な動き のためのキネマティクス計算が起こるところです。 これはすべて、ユーザからの入力なしでシーンの背後で発生します。

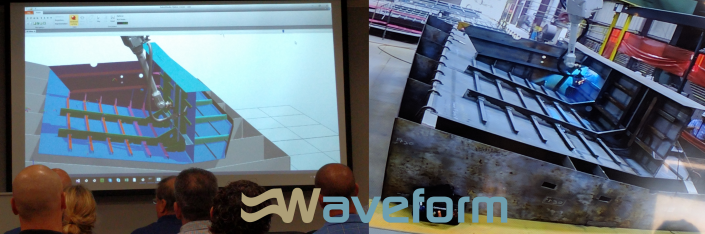
私が以前にブログに書いたCAR-WフェーズIデモ(「ShipConstructorからの自動溶接ロボットの運転」)は、ユニークなフラットパネルに焦点を当てていました。 しかし、このフェーズIIは、二重曲率を有するより複雑なアセンブリで実証された。 以下の溶接情報を含むアセンブリをチェックしてください。
ゲームチェン
私は世界中の多くの(約50)造船所に行ったことがあり、私はこれまでこのタイプの自動化を見たことがありません。 これは本当に私たちの業界のためのゲームチェンジャーですが、デモンストレーションで他の業界の専門家から聞いたように、このシームレスなソリューションは、3Dモデルから溶接情報を読み取り、ロボットプログラミングを必要としない大きな可能性を秘めています。
複雑なアセンブリを自動的に溶接する造船所は間違いなくありますが、これらのケースでは 、造船所は溶接情報をキャプチャし、単一のアセンブリのためのロボットをプログラミングするために数日を費や しています。 この多額の初期投資は、造船所が 同 じ組立体を何度も溶接するシナリオでのみ有益です。 この大量の使用事例は、例えば、中身に多くの共通アセンブリを持ち、通常はシリーズ契約(複数の船)を持つタンカーを建造する場合によく見られます。 しかし、造船所の大半は同じ多くのアセンブリを持っているという贅沢を持っていません。 船のほぼすべてのアセンブリはユニークであり、したがって、ロボットをプログラムするのにかかる時間は、自動的に溶接によって節約された時間を上回っています。
実証されたソリューションは、3D製品モデルに 既 に含まれている溶接情報をロボットパス自動計画ツールに転送します。 転送される溶接情報には、計画ツールが非常に複雑な 9 軸キネマティック計算に使用するすべての関連属性情報が含まれています。 この合理化されたプロセスは驚くべきピンポイントの正確さで自由にロボット 衝突 を運転できる結果を作り出す。 この新しいプロセスは、ロボット溶接のためのアセンブリを準備する時間を大幅に削減するため、世界の造船所の大半にとって費用対効果が高くなります。
SSIの旅

SSIの現在の場所への旅は、溶接管理に関するNSRPプロジェクトで2007年に始まりました。 このプロジェクトは、自動溶接の生成、識別、トレーサビリティ、およびドキュメンテーションに焦点を当てました。 このプロジェクトは、多くの洞察を提供し、業界の専門知識を獲得しました。 このプロジェクトが成功した後、SSIは、数年にわたって当社のクライアントによって使用されているWeldManagement製品を作成するために3年以上投資しました。
私たちの旅の次の段階は、任意の利害関係者によって消費する必要があるコンテキストにShipConstructor海洋情報モデル(MIM)に含まれる事実上すべての情報を抽出することを可能にするEnterprisePlatformの作成でした。 この関係者は、特定の部門の人物またはロボットである可能性があります。 エンタープライズプラットフォームは、SSIがプロジェクトの短期間で成果物を提供できた主な理由でした。
2015年にこのNSRP CAR-Wが受賞し、1年以内に、フラットパネル上の実際のロボットを使用してShipConstructorデータによって駆動されるロボット溶接を実証しました。 1年後(先週)、私たちは驚くべき進歩を続け、二重曲率を持つより複雑なアセンブリでCADモデルからロボットを運転するデモンストレーションを行いました。
不可能を達成する
このプロジェクトを始めたとき、私たちの業界には不可能だと思う人がたくさんいました。 克服する必要があった課題が些細なことではなかった理由を理解できます。 このプロジェクトのためにまとめたコアチーム(SSI、ウルフロボティクス、EWI、ボリンジャー)は、このプロジェクトが成功した本当の理由です。 100%正直に言うと、SSIはプロジェクトの中で最も困難な部分を持っていませんでした。 この賞は、運動学や他の多くの非常に困難な問題を解決することができた間違いなくウルフロボティクスに行きます。 私はまた、非常に革新的で協力的な造船所であることのためにボリンジャーに工藤を与えたいと思います。 この正確なチームがなければ、我々は自分たちがやったことを成し遂げられなかったと本当に思います。
閉会のコメント
インダストリー4.0またはスマートな製造の推進は、彼らが彼らの製造能力を改善する方法を見て多くの造船所を持っています。 老朽化した労働力が退職しようとしているのと組み合わせることで、すべての部族の知識を持って、将来使用できる方法でその知識をキャプチャするためのいくつかのメカニズムを見つけることが不可欠です。 今日のロボットの能力と、ある程度の知識を得るための今日のソフトウェアの能力により、ロボット溶接は合理化に最適な活動です。
少量で多品種の造船所の大部分では、溶接ロボットのプログラミングの初期投資は、手動溶接に必要な時間と労力の利点を上回ります。 CAR-Wを使用すると、ロボットのプログラミングを排除し、本質的にはエンタープライズプラットフォームを介してShipConstructorモデルに既に含まれている情報からロボットを駆動しています。 これはかつて不可能であると考えられていたし、我々はそれが可能であることを私たちの2番目と最後のデモンストレーションで再び証明しました。
これは本当にゲームチェンジャーであり、私はSSIがこの新しい技術の最先端にあると言ってうれしいです。