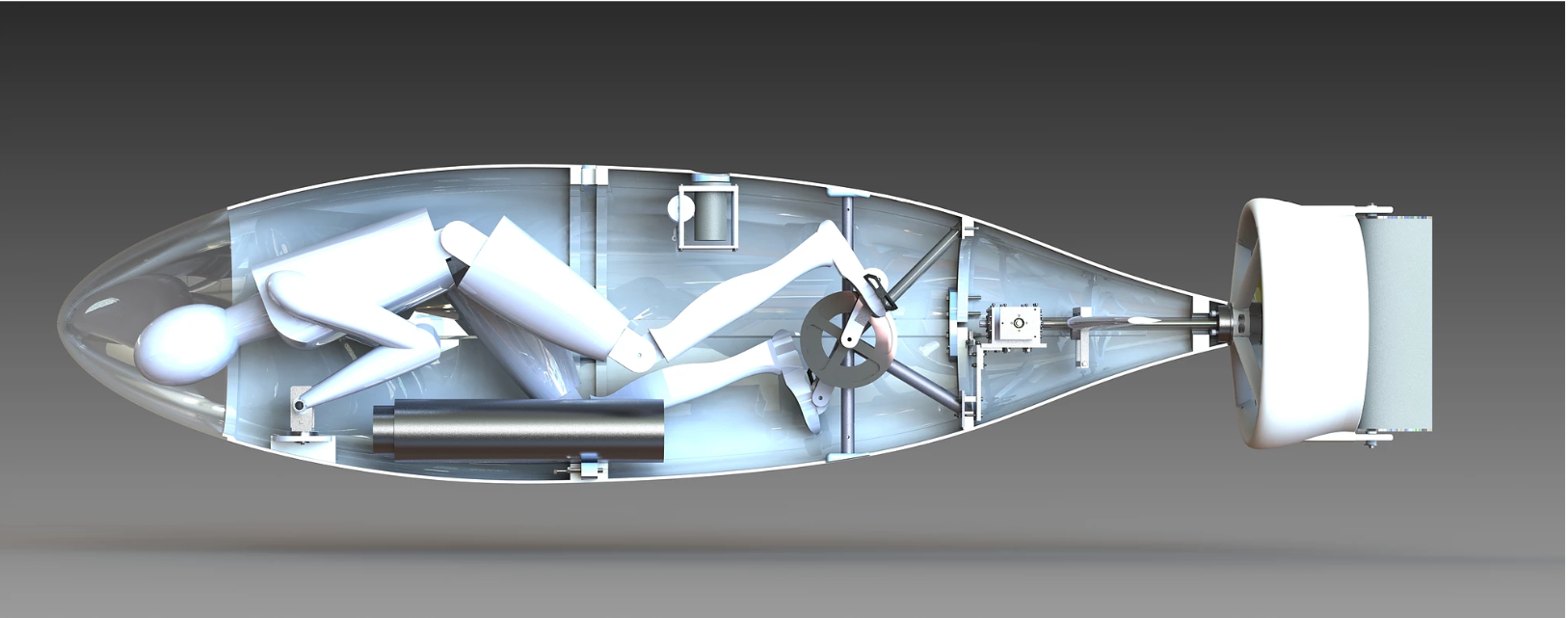
チヌークというペダル駆動の単一人潜水艦の設計に関して、どのように、なぜ特定の設計決定がなされたのかに注目することは興味深いことです。 以下は、UVic潜水艦レーシングクラブからの報告から適応されます:
これは、SSIのUVic潜水艦レーシングクラブとの協力に関するシリーズの2番目のポストです。 前の投稿: “より多くのエンジニアが必要: SSIは応答します” 次のポスト: “SSI学校学生潜水艦レーサー”
ハルデザイン

材料に関する重要な決定が下された:潜水艦の重量は変位に基づいて固定されているため、船体は炭素繊維の代わりにグラスファイバーで作られた、すなわち炭素繊維を使用して保存された重量は、中性浮力を達成するために使用されるより少ない泡に変換される。
安全のために、船体の縫い目は垂直ではなく水平平面上にあったので、前方セクション全体がエスケープハッチとして倍増することができました。 内部構造の取り付け点は、部品を容易に取り外すことを可能にするために船体に置かれた。 最後に、イギリスの競争への輸送のお金を節約するために、船体は飛行機の大きな荷物の上の荷物に収まるように4つのセクションに分割されました。 賢い。
推進システム設計
前述のように、サブの推進力はペダルパワーになります。 様々な潜在的なドライバーに対応するために、クラブは調整可能なショルダーブレースを使用して、最小の人ではなく、テスト中に最高の全体的なパフォーマンスでドライバーを選択することができました。
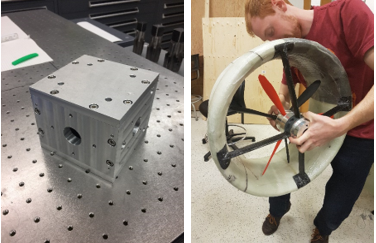
アルミニウムサポートシステムは、サブの外でテストできるように作られ、ギアボックスは効率計算と電力要件に基づいてテスト中に最適化されるように設計されました。
また、全体的な効率を助けるために、設計は刃の先端に形成される渦を除去し、集中した方向に液体の流れをリダイレクトするKortのノズル推進システムを実装した。 これにより、プロペラブレードの後に舵を実装することができました。
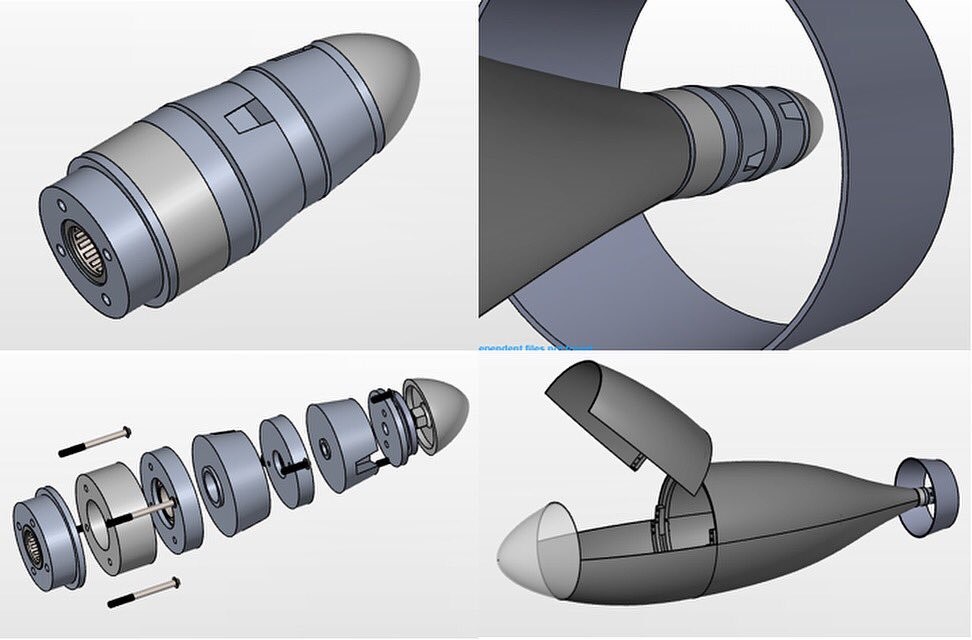
ステアリング制御システム
舵はプロペラの刃の後ろに置かれたので、それは舵の持ち上がる力が重心から遠く離れているため、サブがより高い「回転の瞬間」を達成することを可能にした。 また、舵への均一なマスフローを生み出したため、Kort Nozzleによりステアリングも改善されました。 パッド設計ダイビングプレーンは、ドラッグ力を減らすために選択されました。
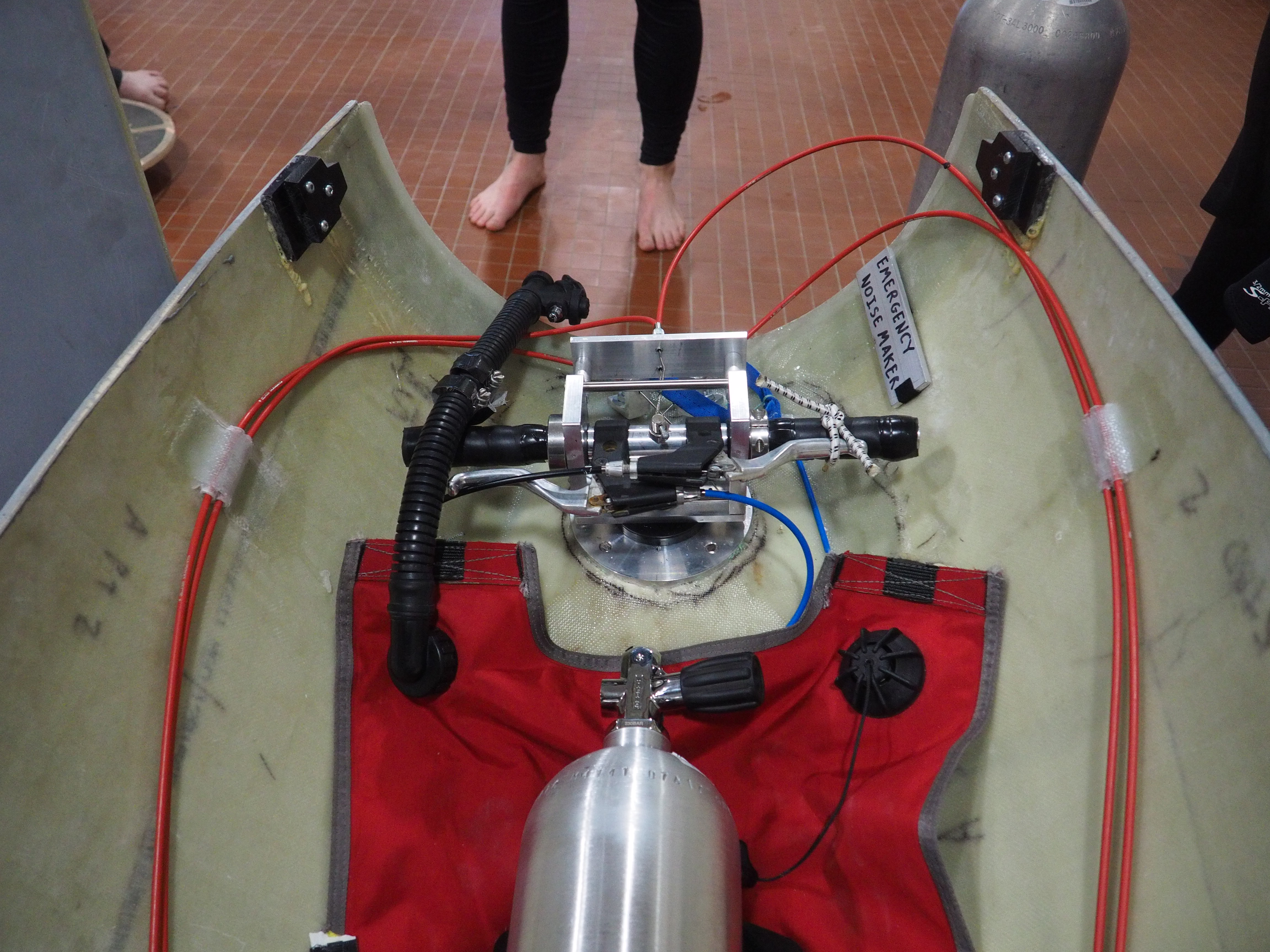
しかし、これらすべての技術的な詳細に加えて、あなたはサブが実際にどのように操縦され、制御されているのか疑問に思うかもしれません。 答えは、舵とダイブプレーンにケーブルで取り付けられたハンドルバーで制御されるということです。 ドライブは左右に動く操縦する。 ハンドルバー(オートバイなど)の回転スロットリングモーションで、ドライバーはダイビングプレーンを制御します。
安定性・浮力システム

サブは、その長さ全体の空気ダイアフラムを持っています。 PVCフォームポケットは、正の浮力を作成し、低重心を作成するためにカウンターウェイトです。 興味深いことに、チームは、空気タンクから空気が放出されるにつれて潜水艦が体重を減らすのが一般的であることを知ったため、浮力補償装置(BCD)を実装しました。 BCDは質量の変化を考慮してレベルレース完了を確実にするように設計されました。
安全解放システム

最後に、安全は見逃せないので、競争ルールに従って、サブは助けが必要な場合に知らせるためにパイロットによって解放することができる高い視認性表面メーカーブイを持っています。 クラッチの形で「デッドマンズスイッチ」を使用して、物事が本当に深刻な場合は、パイロットが無力化され、クラッチハンドルを絞ることができない場合、安全ブイは自動的に解放されます。
概要
ご覧のとおり、この大会に参加したことがないにもかかわらず、UVicチームは潜水艦チヌークの設計に多くの考えを入れました。 SSI はこのプロジェクトの一部であることをうれしく思います。